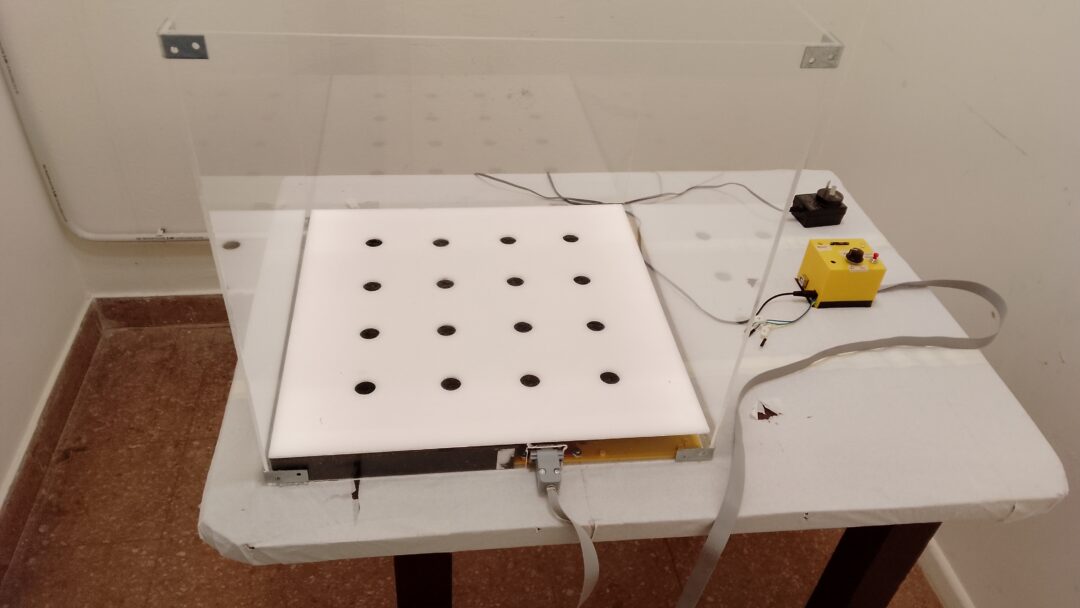
Greg Silas, from the University of Ottawa, has kindly contributed the following to OpenBehavior. “Silasi et al developed a low-cost system for fully autonomous training of group housed mice on a forelimb motor task. We demonstrate the feasibility of tracking both end-point as well as kinematic performance of individual mice, each performing thousands of trials over 2.5 months. The task is run and controlled by a Raspberry Pi microcomputer, which allows for cages to be monitored remotely through an active internet connection.” This research tool was created by your colleagues. Please acknowledge the Principal Investigator, cite the article in which the tool was described, and include an RRID in the Materials and Methods of your future publications. Project portal RRID:SCR_021562; Software RRID:SCR_021603 Check out projects similar to this!Autonomous Training of a Forelimb Motor Task


Read the paper

Have questions? Send us an email!
Read more in their paper published in the Journal of Neurophysiology!
Find the necessary python code in this DropBox folder!